
airqualitysensor.cpp
#include "DFRobot_AirQualitySensor.h"
//(Address 0x19)
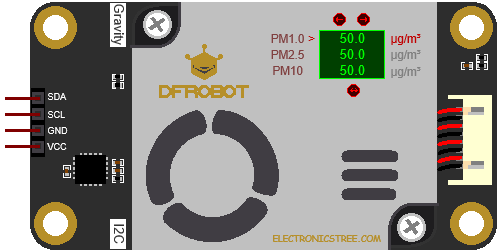
DFRobot_AirQualitySensor pmSensor(&Wire, 0x19);
void setup() {
Serial.begin(9600);
Serial.println(F("\n=== Gravity PM2.5 Sensor Initialisation ==="));
uint8_t attempts = 0;
while (!pmSensor.begin()) {
Serial.println(F("Sensor not detected. Check wiring / I²C address."));
delay(1000);
if (++attempts >= 5) {
Serial.println(F("Giving up. Halting."));
while (true) { delay(1000); }
}
}
Serial.println(F("Sensor initialised successfully."));
uint8_t version = pmSensor.gainVersion();
Serial.print(F("Firmware version: "));
Serial.println(version);
Serial.println();
delay(1000);
}
void loop() {
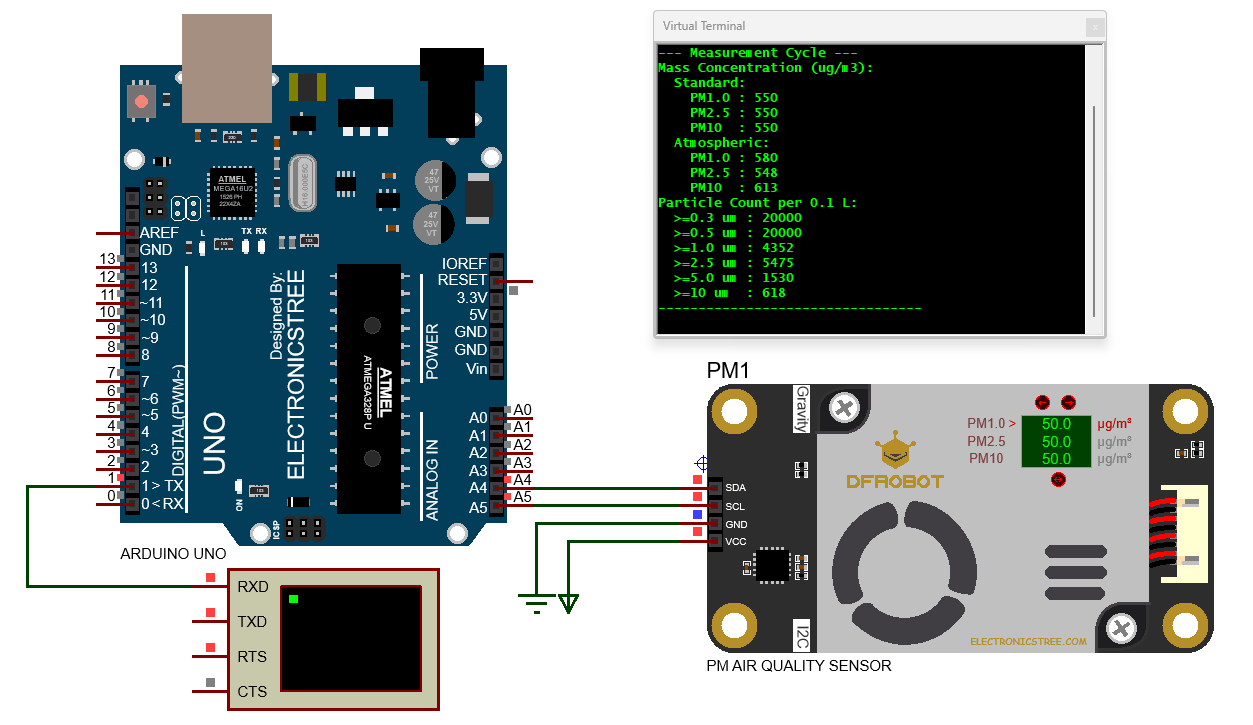
Serial.println(F("--- Measurement Cycle ---"));
/* ---------- Mass Concentrations (µg/m³) ---------- */
// Standard values (factory calibration)
uint16_t pm1_0_std = pmSensor.gainParticleConcentration_ugm3(PARTICLE_PM1_0_STANDARD);
uint16_t pm2_5_std = pmSensor.gainParticleConcentration_ugm3(PARTICLE_PM2_5_STANDARD);
uint16_t pm10_std = pmSensor.gainParticleConcentration_ugm3(PARTICLE_PM10_STANDARD);
// Atmospheric environment values
uint16_t pm1_0_atm = pmSensor.gainParticleConcentration_ugm3(PARTICLE_PM1_0_ATMOSPHERE);
uint16_t pm2_5_atm = pmSensor.gainParticleConcentration_ugm3(PARTICLE_PM2_5_ATMOSPHERE);
uint16_t pm10_atm = pmSensor.gainParticleConcentration_ugm3(PARTICLE_PM10_ATMOSPHERE);
Serial.println(F("Mass Concentration (ug/m3):"));
Serial.println(F(" Standard:"));
Serial.print(F(" PM1.0 : ")); Serial.println(pm1_0_std);
Serial.print(F(" PM2.5 : ")); Serial.println(pm2_5_std);
Serial.print(F(" PM10 : ")); Serial.println(pm10_std);
Serial.println(F(" Atmospheric:"));
Serial.print(F(" PM1.0 : ")); Serial.println(pm1_0_atm);
Serial.print(F(" PM2.5 : ")); Serial.println(pm2_5_atm);
Serial.print(F(" PM10 : ")); Serial.println(pm10_atm);
// Particle Counts per 0.1 L
uint16_t cnt_0_3 = pmSensor.gainParticleNum_Every0_1L(PARTICLENUM_0_3_UM_EVERY0_1L_AIR);
uint16_t cnt_0_5 = pmSensor.gainParticleNum_Every0_1L(PARTICLENUM_0_5_UM_EVERY0_1L_AIR);
uint16_t cnt_1_0 = pmSensor.gainParticleNum_Every0_1L(PARTICLENUM_1_0_UM_EVERY0_1L_AIR);
uint16_t cnt_2_5 = pmSensor.gainParticleNum_Every0_1L(PARTICLENUM_2_5_UM_EVERY0_1L_AIR);
uint16_t cnt_5_0 = pmSensor.gainParticleNum_Every0_1L(PARTICLENUM_5_0_UM_EVERY0_1L_AIR);
uint16_t cnt_10 = pmSensor.gainParticleNum_Every0_1L(PARTICLENUM_10_UM_EVERY0_1L_AIR);
Serial.println(F("Particle Count per 0.1 L:"));
Serial.print(F(" >=0.3 um : ")); Serial.println(cnt_0_3);
Serial.print(F(" >=0.5 um : ")); Serial.println(cnt_0_5);
Serial.print(F(" >=1.0 um : ")); Serial.println(cnt_1_0);
Serial.print(F(" >=2.5 um : ")); Serial.println(cnt_2_5);
Serial.print(F(" >=5.0 um : ")); Serial.println(cnt_5_0);
Serial.print(F(" >=10 um : ")); Serial.println(cnt_10);
Serial.println(F("---------------------------------\n"));
delay(2000);
}
Show more

{kind=link}
Not working for Proteus 9 64bit even installing Microsoft dependencies. : ( . External model DLL “AQSENSOR.DLL” not found. GLE=0x000000C1.
Proteus 9 actually has two model folders, so specify which one you are trying to put the model files in. Proteus 9 uses different locations for its model folders, and you can find them in the system settings. Locate your ProgramData folder in Windows; there you will find the model folder. Paste the files into that folder.
Even after installing and reinstalling latest Visual C++ Redistributable it shows that error on proteus 9.
Can you explain which error you mean?
External model DLL “AQSENSOR.DLL” not found. GLE=0x000000C1. This one.
External model DLL “AQSENSOR.DLL” not found. GLE=0x000000C1. This one
Actually, all the sensors that had a .dll (i.e. Oxygen sensor, accelerometer) file are not working with proteus 9 if the model files are kept in the model folder that is in this path (C:\ProgramData\Labcenter Electronics\Proteus 9 Professional\Models). So, which folder do I need to keep the .dll file in.
Have a solution for the External model DLL “AQSENSOR.DLL” not found. GLE=0x000000C1. was found in proteus 9
Proteus 9 uses a 64-bit architecture, while all the models that include DLL files were originally built for 32-bit systems. When someone tries to use these models in Proteus 9, the first error they encounter is “model.dll not found.” Even if the files are converted to 64-bit, they still fail to operate in Proteus 9 due to a licensing issue.